
PIAP IBIS®
PIAP IBIS® is a robot designed for pyrotechnic operations and reconnaissance. Upon installation of additional devices, it can be used, among others, for disposal of dangerous objects, chemical detection and rescue operations.
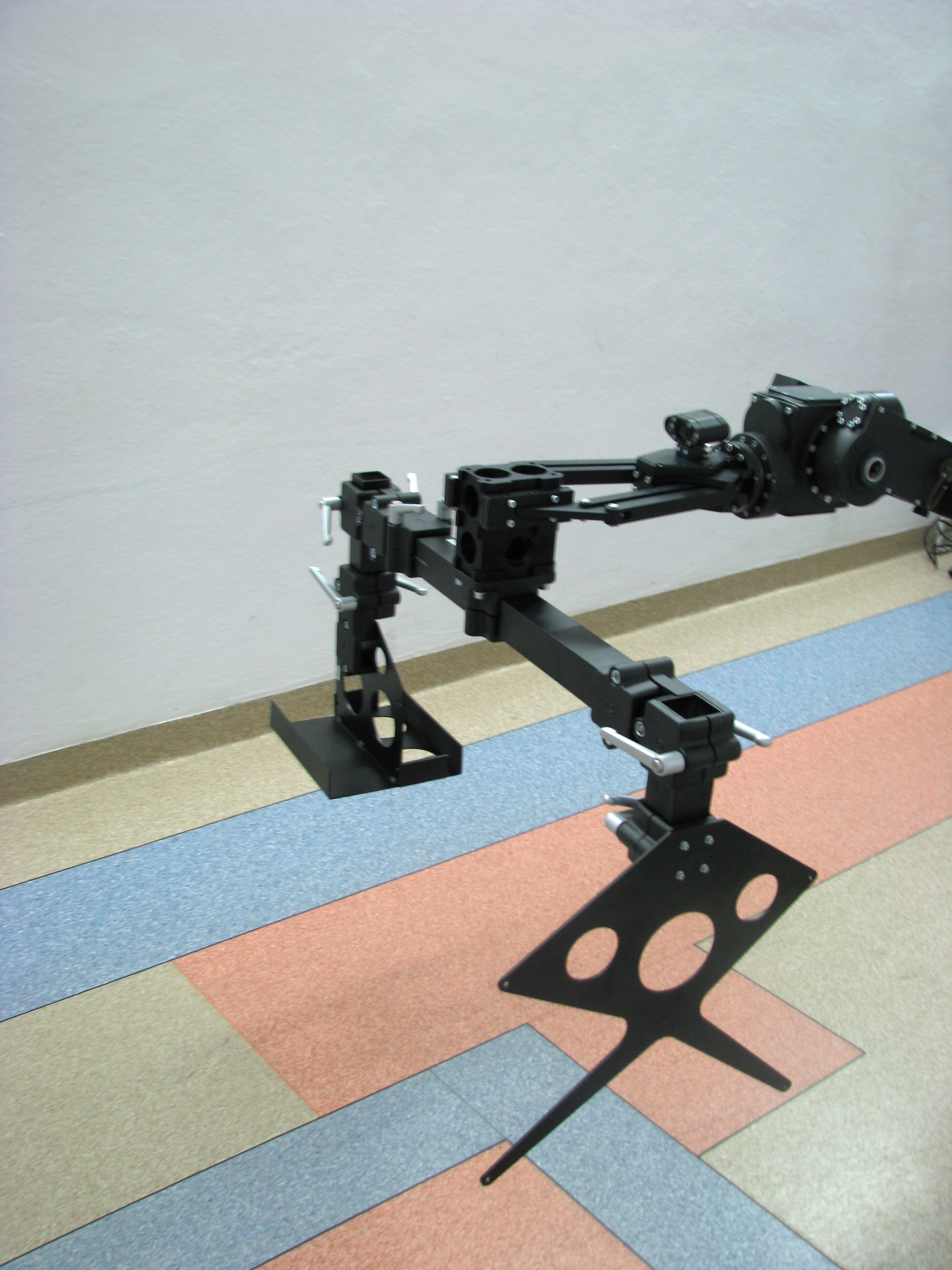
Six-wheeled chassis with independent drive of each wheel allows to operate in challenging and varied terrain. PIAP IBIS® is a fast robot (10 km/h). Special design of mobile base suspension ensures optimum wheel contact with the ground. Manipulator with extendable arm ensures a large reach (over three meters) and a high range of motion in each plane.
PIAP IBIS Leaflet 0.33 MB
Technical data
( all weights and dimensions are approximate and details are subject to change without notification )
Dimensions
135 x 88 x 125 cm (LxWxH)
Total mass
320 kg
Speed
up to 10 km/h
Manipulator’s maximum lift
up to 50 kg
Manipulator’s maximum range
3,3 m
No. of degrees of freedom (manipulator)
6 + clamp of gripper
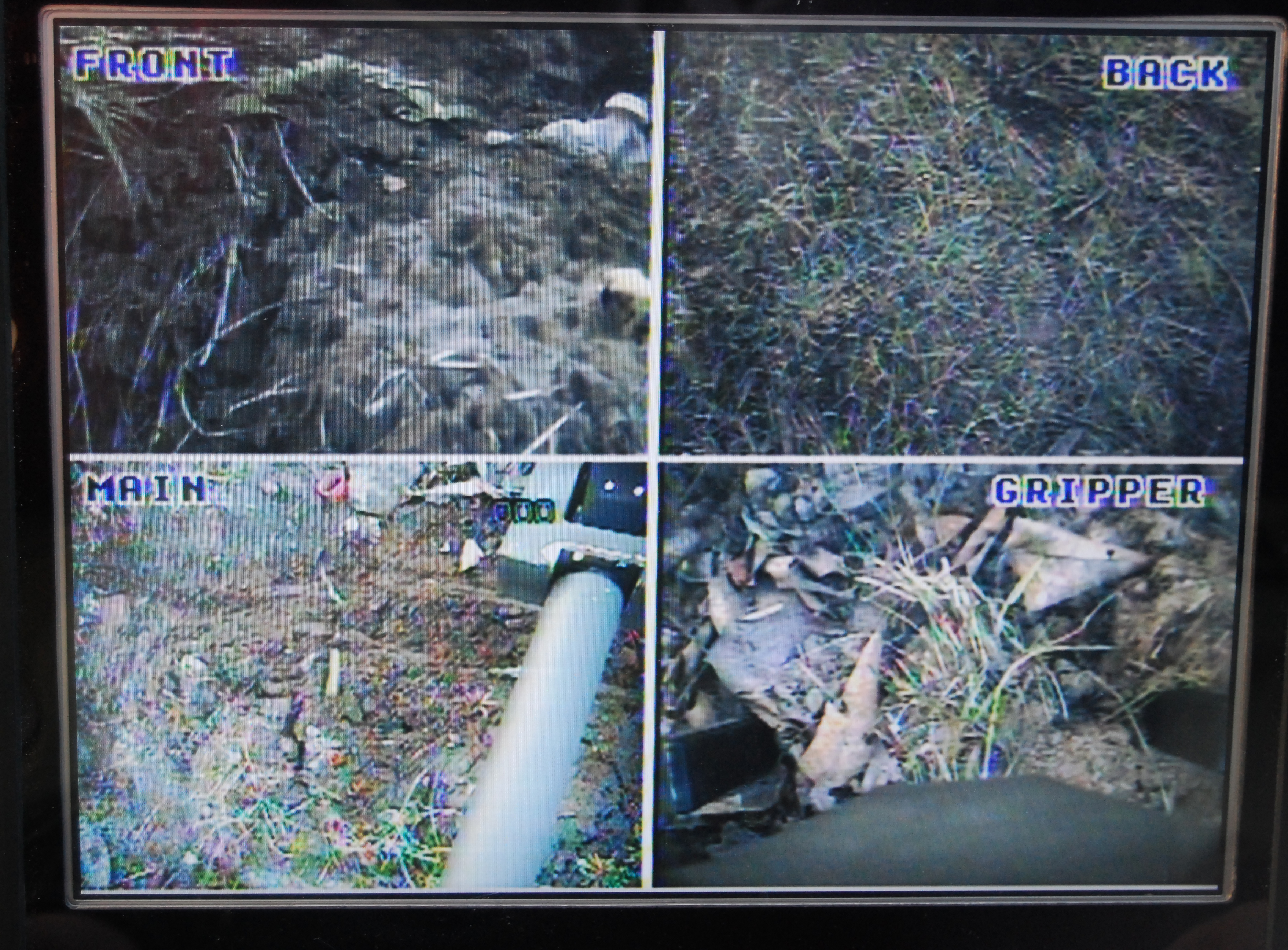
No. of robot’s cameras
4
Maximum battery operation time
approx. 4 hours (mission dependent)
Drive system
wheels
Accessories

Equipment:
– camera with IR illuminators for day and night vision – weight [kg]: 2.1,
– lasers (2 pcs.),
– safety switch,
- weight:[kg]: 2,1
- dimensions [cm]: 12-20.5(W) x 14(H) x 11(L)

- enables mounting a Benelli M4 Super 90 rifle
- equipped with laser sight, accessories connector and safety switch
- materials: steel + aluminium
- weight [ kg]: 3
- dimensions [cm]: 68(L) x 24(H) x 10.5(W)

- PIAP IBIS robot works with an X-ray device with dispensable screens
- adapter for X-ray device is composed of:
– adapter to mount the device in the gripper
– telescopic boom
– screen holder
– radiation generator holder


- compatible with AP2C sensor




- uenables steering the robot without radio communication
- essential for connecting the repeater
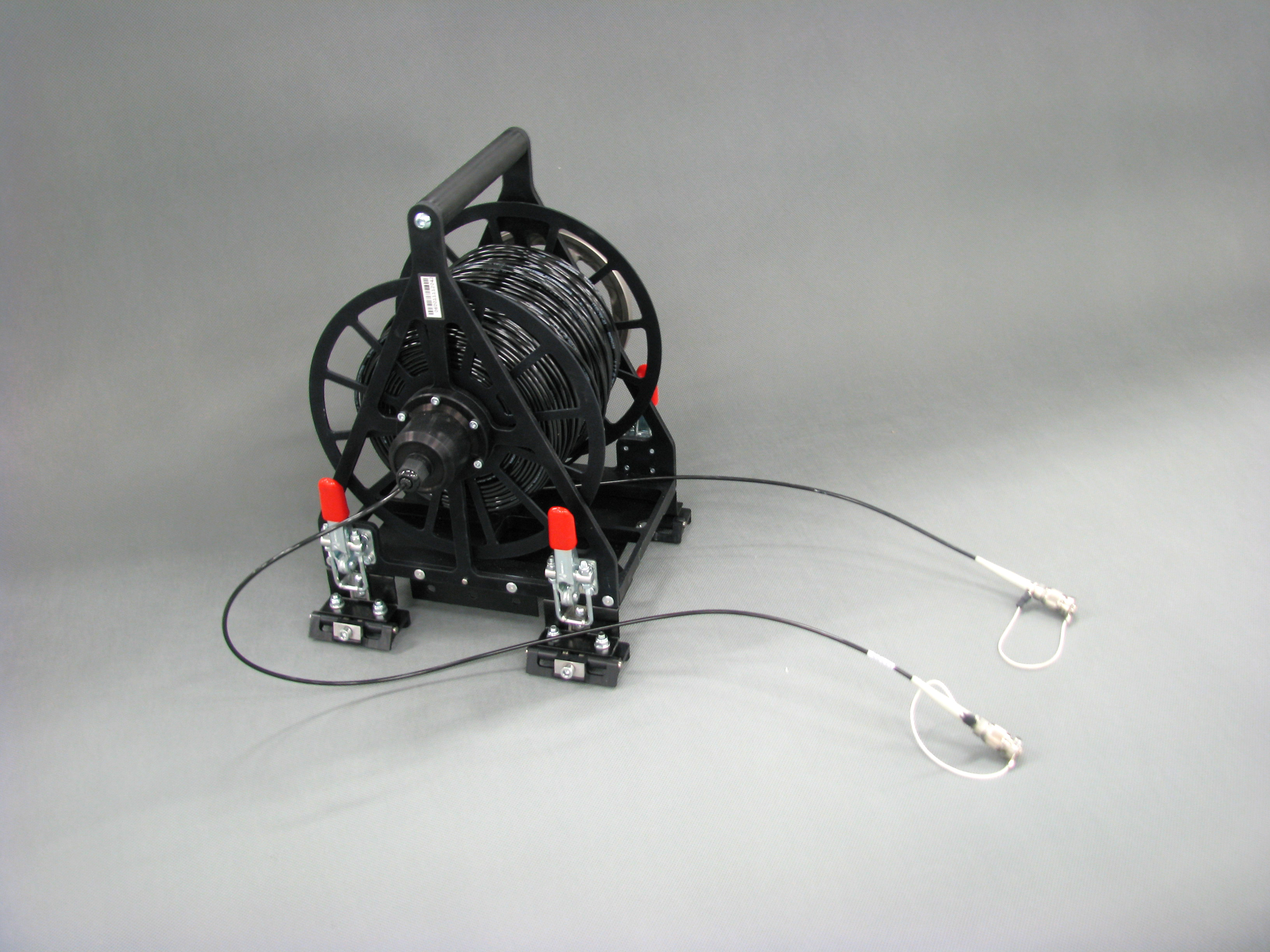
- the passive fibre optic cable winder set consists of:
– body
– crank
– short fibre optic cable
– long fibre optic cable (on the reel)
– RIS rail holders - weight [kg]: 3.1
- dimensions [cm]: 21(L) x 25(W) x 28(H)
- technical specification of the fibre optic:
– minimum bending radius: 25mm
– maximum tensile force: 300N (30.5 kg) - Available length: [m]: 150, 300

- enables steering the robot without radio communication
- cable length: up to 300m
- weight [kg]: 6.15
- dimensions [cm]: 28(L) x 23(W) x 24(H)

- for remote detonation of the explosives
enables remote location of antennae

- PIAP IBIS works with a negotiation kit which consists of:
two microphones and one loudspeaker installed on the mobile base and a microphone connected to the control panel - Negotiation kit requires fibre optic remote control

Digital recorder for recording image obtained from the robot



- small steering panel
- internal battery (charger 230v)
- weight [kg]: 0.43
- dimensions [cm]: 16.5(L) x 11(W) x 3.5 [+3.5 joysticks] (H)
- range: [m]: 10 (in the open area)
- operating time: estimated at min. 1h

-
- additional battery for the control panel
ul>
-
- additional battery for the mobile base
-
-
- Enables continuous work of the control panel, while connecting to power source
łączenia do źródła prądu
- Enables continuous work of the control panel, while connecting to power source
-

-
-
- Doubles the operating capacity of the robot
- Requires the installation of fibre optic cable or passive fibre optic winder.
-

-
-
- the device works automatically and requires no other action from the operator
- the breaker consists of a the bolt terminated with sintered carbide and an inner hammer system. The housing allows the device to be held with gripper jaws.
-

-
-
- Environmental swab
- Ground sampler
- Forensic samplers set
- SPME adsorber
- R – Sensor (integrated EKO-C)
-

-
-
- Knocking windows, knocking holes in surfaces and lock fittings or other small parts
(the principle of „pile driver”) - Piercing objects, e.g. tires
- Breaking hinges
- Cutting metal rods, cables, wires, chains, tubes
- Cutting off elements
- Initiating non-electric detonators such as STS, NDS, NONEL
- Basic operating tips:
– Cutter for cable, wire and rod;
– Punches for windows and other components;
– Triggers to initiate explosion with non-electric detonation systems
– Cutters (knives and blades)- Possibility of designing tips for specific needs of the user
- Knocking windows, knocking holes in surfaces and lock fittings or other small parts
-

-
-
- for detection of errors and faults in the robot
- for changing settings and configuration of the robot
- accessories and SVGA connector
-

-
-
- enables vision at night
- fixed near the gripper camera
- power supply from the robot
- remote turn off function located near the camera view switch
- dimensions [cm]: 20(L) x 9 (H)
-
-
-
- line with a hook to tow a car
-
We declare willingness to modify the robot and optional equipment according to the user’s needs.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}